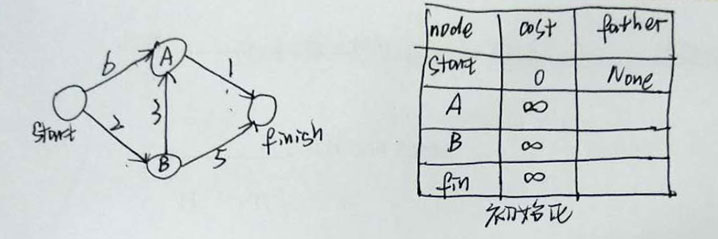
definitialize_costs_n_fathers(graph): costs, fathers ={},{} for node in graph: if node is"start": costs[node] = 0 fathers[node] = None else: costs[node] = float('inf') return costs,fathers
defget_shortest_path(fathers): path = [] father = 'fin' path.append(father) while father != 'start': father = fathers[father] path.append(father) print'Shortest path is:', for i in path[-1:-len(path):-1]: print'{}-->'.format(i), print path[0]
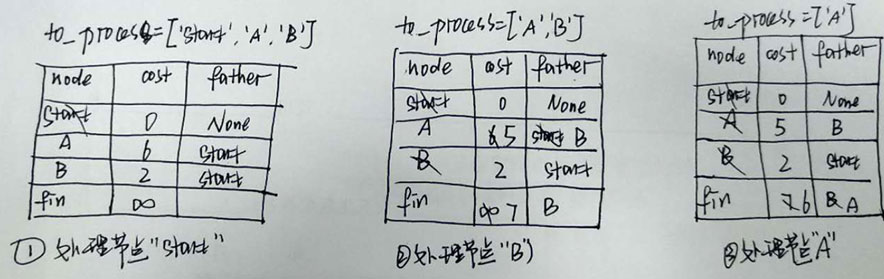
defmain(): graph = set_up_graph() print'Graph as below:' pprint(graph) print'\n' costs, fathers = initialize_costs_n_fathers(graph) to_process = [i for i in graph.keys()] to_process.remove('fin') while to_process: node = find_lowest_cost(costs,to_process) neighbors = graph[node] for neighbor in neighbors: new_cost = costs[node] + graph[node][neighbor] if new_cost < costs[neighbor]: costs[neighbor] = new_cost fathers[neighbor] = node to_process.remove(node) # keys donnot share names get_shortest_path(fathers) print'The lowest cost is {}.'.format(costs['fin']) if __name__=='__main__': main()